

This month's article deals with a few of the more difficult problems encountered in level controls. Before going into them it would be appropriate to summarise a few important points on integrating processes as previously given in my Loop Signature series generally published in alternate months in this magazine.
1. Levels are generally integrating (or ramping) processes.
2. Very few people have any feeling, understanding, or idea on how to tune these loops properly, mainly due to a huge lack of training by educational institutions on such processes.
3. Integrating processes are always 'balancing' processes wherein the process variable can only stay constant if the input and output of the process are at the same value. In the case of a level control, the level can only stay at the same value if the inflow and outflow are the same. If they are not at the same value, the level will be ramping up or down, as the case may be.
4. Integrating loops tend to be very cyclic either due to poor tuning, or if valve problems like hysteresis exist, particularly if the Integral term is used in the controller. In fact as a general rule, you need good valves on these processes or really bad control can result. (Hysteresis is caused by a combination of static friction, and mechanical play, or deadband, arising when a valve is reversed).
5. The response of the control is very dependent on a strict relationship between the process gain, the controller's proportional gain, and the controller's integral value.
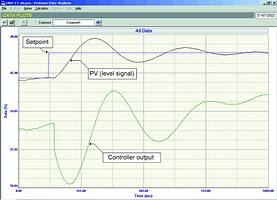
Figure 1 illustrates a simple tank level in a petrochemical plant, with tuning as typically encountered in the first 'as-found' closed loop test. The process was relatively stable until a step change in setpoint was made. As can be seen, the process responded in a very cyclic fashion with large over and undershoots, and then took a very long time to settle out.
After correct tuning for 'tight' level control, the response to a setpoint change can be seen in Figure 2. The process moved up to setpoint extremely fast. After a single small overshoot it settled out at setpoint in a very short time. This example illustrates how important it is to tune an integrating process like a level correctly if really bad control is to be avoided.

As mentioned above, bad valves can also create havoc on the control of a level loop. Figure 3 shows a closed loop recording of a well-tuned level control loop cycling in automatic. (Note that no setpoint changes were made during the test.)

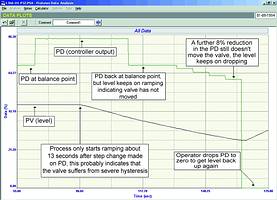
The open loop test in Figure 4 shows how the valve exhibited tremendous hysteresis. At the commencement of the test the process was in balance. A step change was made on the PD (controller output). However, the level only started ramping about 13 s later which would indicate that the valve was sticking for quite a while before the actuator overcame the hysteresis. Once the level had ramped down a bit, the PD was brought back to the balance point; however, the level kept on steadily ramping down. This meant that the valve had not moved at all. The PD was then lowered in a further four 2% steps, but still the valve would not move. Eventually the operator shut the valve fully to get the level back up again.
There is no way that one can properly control level with a valve in this state. When the loop was placed in automatic it started cycling as shown in Figure 3. Essentially the cycle is being caused by the fact that the controller cannot get the valve to reverse quickly enough. The valve is sticking and when it finally does reverse and move, it goes too far, thus swinging the level the other way. As mentioned earlier, and very unfortunately, integrating loops do require good valves, or problems of this nature can be easily encountered.
Remarkably one of the technicians in the plant reasoned that if one was to keep the valve continuously reversing at a fast rate then reasonable control could probably be obtained until the next plant shutdown when the valve could be repaired. To achieve this he added a little derivative to the controller. This reacted sharply with the noise on the loop to keep the valve moving up and down. To my amazement it actually worked extremely well. The control with setpoint changes up, and then down is shown in Figure 5. (Note the setpoint signal is not shown in this recording). However, it must be noted that a valve subjected to this treatment for too long will have its life severely shortened.

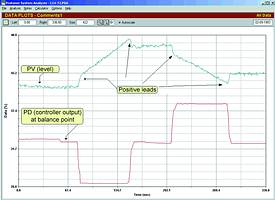
The third and last example in this article is level control of a cryogenic fluid. Figure 6 shows an open loop test on a level of such a fluid. The interesting thing about this process is that each time a step change is made on the PD, the level responds firstly with a kick before starting the ramp. This response is sometimes known as a 'positive lead integrator'. This is a very unusual phenomenon on level controls. Positive lead integrators are a particular class of dynamics and require a special tuning technique.
For more information contact Michael Brown, Michael Brown Control Engineering, 011 486 0567, [email protected], www.controlloop.co.za
Michael Brown is a specialist in control loop optimisation, with many years of experience in process control instrumentation. His main activities are consulting, and teaching practical control loop analysis and optimisation. He gives training courses that can be held in clients' plants, where students can have the added benefit of practising on live loops. His work takes him to plants all over South Africa, and also to other countries.
| Email: | [email protected] |
| www: | www.controlloop.co.za |
| Articles: | More information and articles about Michael Brown Control Engineering |


© Technews Publishing (Pty) Ltd | All Rights Reserved
 printer friendly version
printer friendly version