A couple of SWAG methods of tuning were given in the previous Loop Signature article. I have tuned a simple self-regulating process using those methods, and also two other tuning methods, one of them being the sophisticated Protuner tuning package, which is the system that I employ. The tests were performed on a very accurate and powerful simulation package, and the results are compared below.
The process that was tuned is a simple first order lag, deadtime, self-regulating process with the model:

where PG = 1,5, DT = 3,0 seconds and TC = 3,0 seconds.
Note that this model meets all the SWAG model tuning assumptions listed in the previous Loop Signature article. It would have been very easy for me to have used a more complex model, and then to have said that SWAG tuning methods are useless. Instead they should work extremely well on this model.
For the sake of interest, the Ziegler Nichols ultimate sensitivity tuning test gave an ultimate gain of 10,45, and an ultimate period of 11,50 seconds. With these figures and the figures given above for the model, the reader should be able to calculate tuning for the Ziegler Nichols, the Lambda, and the IMC methods using the formulae given in the last article. The results obtained should correspond to those listed in the table below.
First, here is a word about the other two tuning types shown in the table that have not been previously discussed.
The SWAG method proposed by Cohen and Coon appears in many articles on tuning, and also in a few manufacturers’ controller manuals. I have not given the formulae, which are extremely long and laborious, because in my experience the method is not good and seldom gives even reasonable tuning.
The Protuner, which is a commercially available loop analytical package, contains a tuning system developed by a particularly brilliant control engineer, David Ender of Techmation, in conjunction with an eminent mathematician, Dr Alin Popluca. The tuning is accomplished by translating a step response into the frequency domain, which then allows the true theory, as developed by the early mathematicians in the 1930s, to be used to calculate tuning for values for any desired response. On top of that, the software also contains a ‘tree of knowledge’ based on Ender’s experience obtained by optimising hundreds of thousands of processes during his career. This further refines the tuning for certain more difficult types of processes, for example dead-time dominant processes.
The beauty of the system is that it is not a SWAG method; it does not try to obtain tuning from a model, but uses the frequency response to obtain the tuning. Over the many years I have been using the Protuner, I have come to rely absolutely on its ability to tune any type of process dynamic. In fact, it is the only tuning system of the many that I have tried that consistently gives good results on any type of process dynamics. Provided the step test gives a true representation of the process, the Protuner gives excellent and very reliable tuning.
As can be seen in the table, the tuning obtained by the various methods differs quite widely in general. The Protuner’s result should in fact be different, as its fast tune allows for one overshoot and undershoot in the response to a setpoint step change. All of the others should have been the same, as they all try give a quarter wave damped response. See my previous Loop Signature article for the reasons we do not like this response.
Delegates on my courses always ask why the tunings are so different? The answer lies in the fact that no SWAG method really works very well. If any of them had been able to give correct tuning, then the matter would have stopped there. There would not have been the proliferation of tuning methods that we see today. Literally hundreds of people have, and still are, trying to come up with better and more consistent SWAG methods.
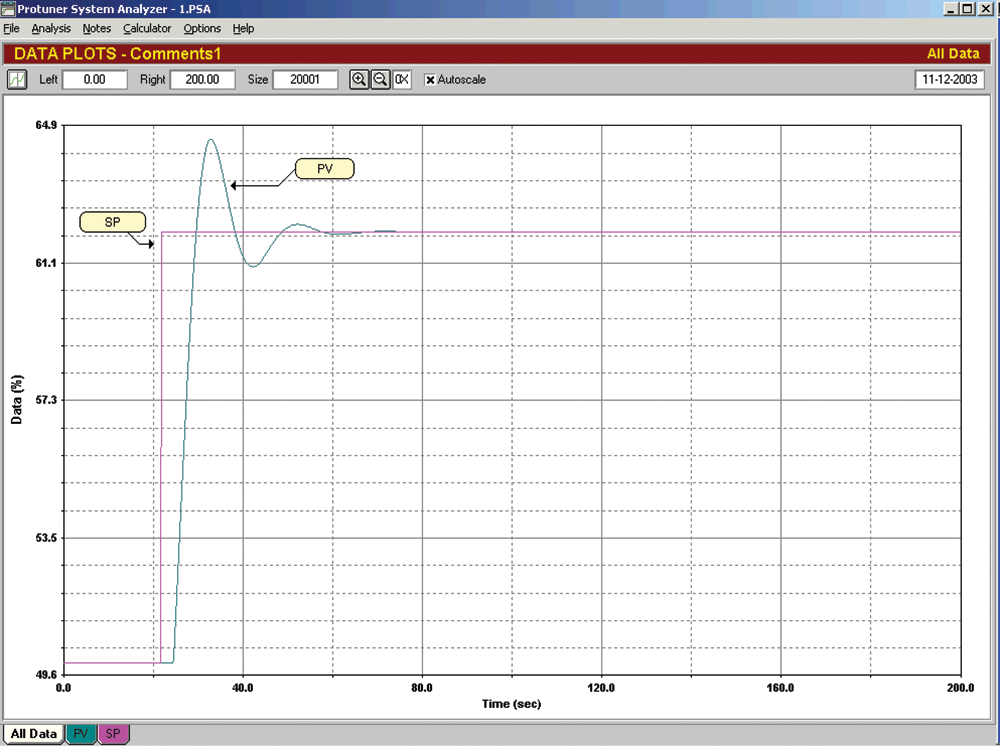
Let us examine how each of the tunings reacted to a step response of setpoint.
• Figure 1 is the response given by the Ziegler Nichols ultimate sensitivity tuning method. It’s actually pretty good. It’s pretty close to quarter wave damping, which people might find hard to believe, but as mentioned in the previous article, it’s actually very difficult to see four cycles in a true quarter wave damped response.
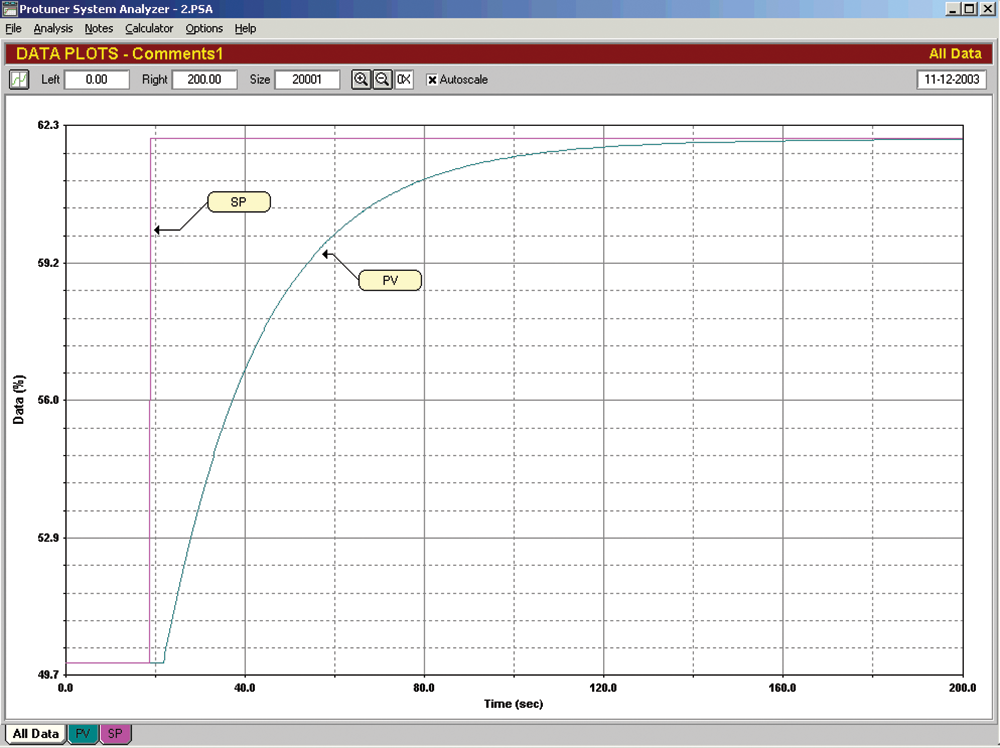
• Figure 2 is the Lambda method. It is far from quarter wave damping, and is in fact very overdamped.
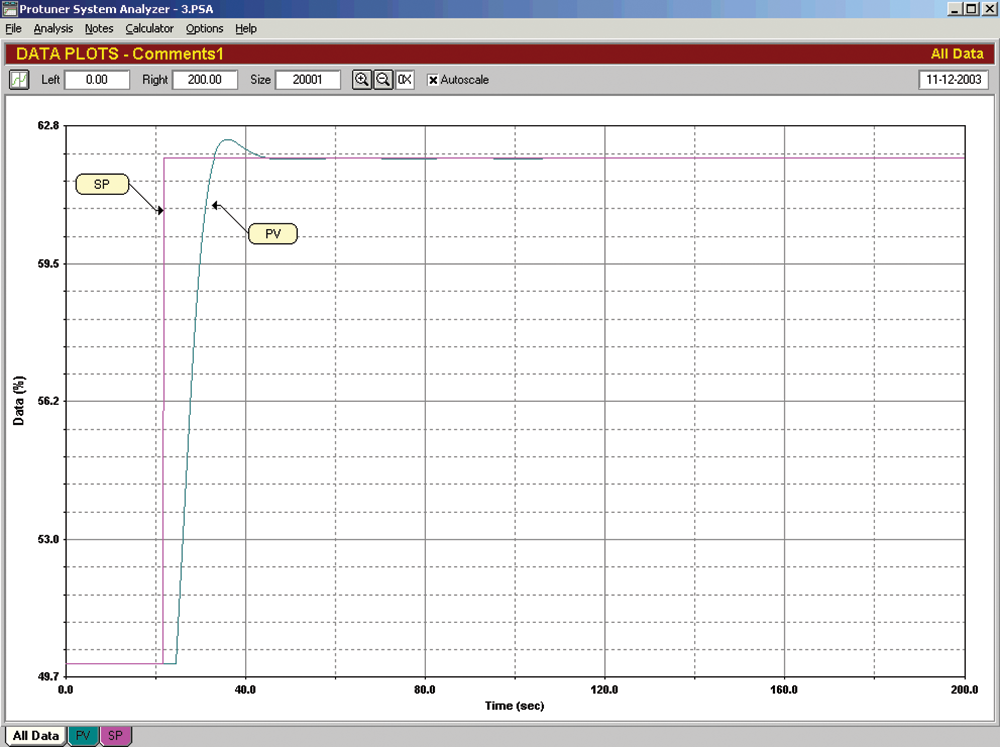
• Figure 3 is the IMC tuning. It is much better, but is still quite far away from quarter wave damping.
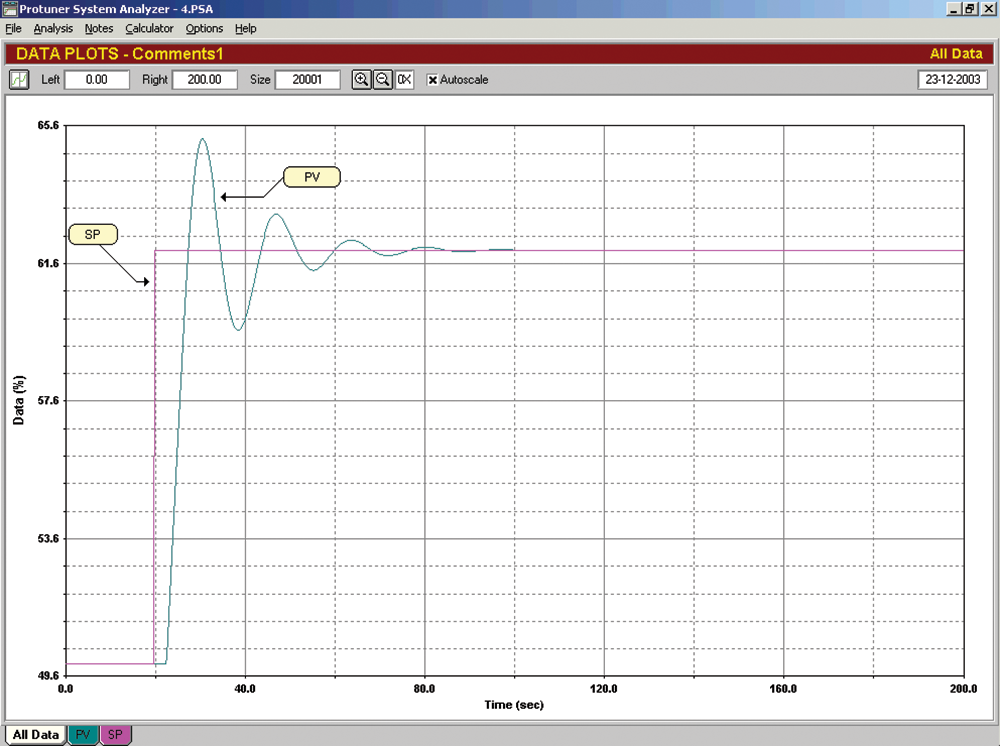
• Figure 4 is the Cohen Coen result. It is terrible, and is in fact pretty close to instability − a very dangerous tune.
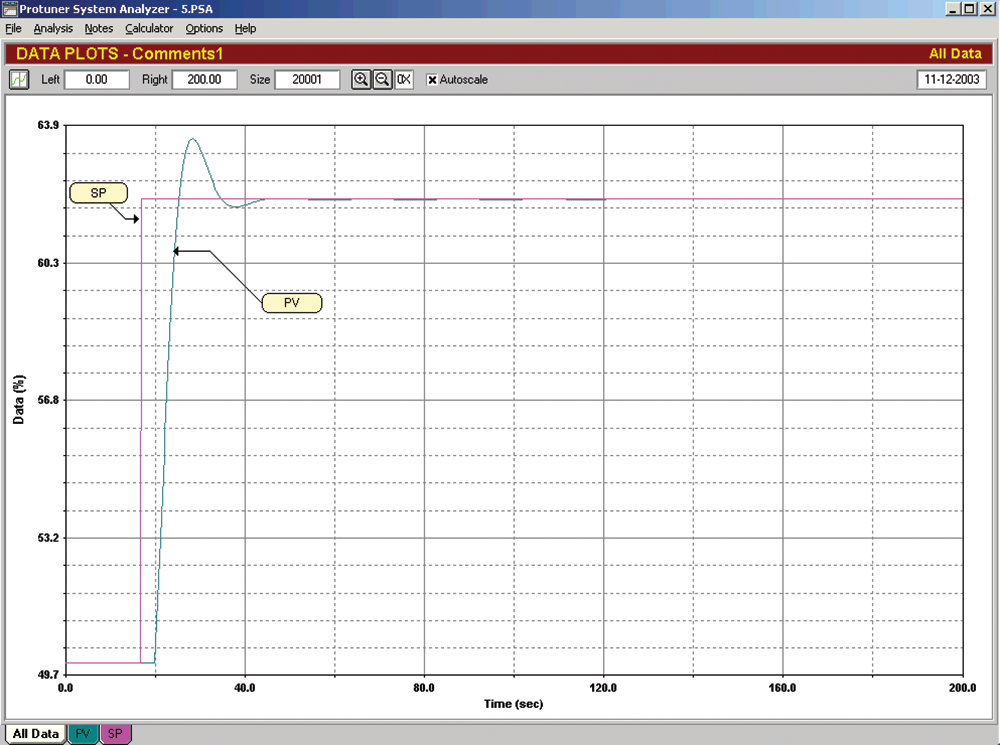
• Figure 5 is the Protuner tuning, and gives a result exactly how it’s supposed to, namely one overshoot and one undershoot. This is not surprising. The method uses all the theory and more. As I often mention to course delegates, it wouldn’t be worth much if it couldn’t tune a simple process like this. It’s a bit like using a sledgehammer to crack a nut.
I believe that this example also shows that if all the other SWAG methods have difficulties tuning a simple process like this, then there is little chance of them succeeding when one deals with more difficult process dynamics; and justifies my contention that in fact you do need a sophisticated scientifically based tuning package like that in the Protuner if you are serious about optimisation.
In the next article in this series we will investigate the basics of tuning theory using the results obtained from the tuning above, and try and gain an understanding of some of the really important principles which one should understand about tuning self-regulating processes.
I would recommend that you keep the previous articles and this one handy, as you will need to refer to them again.
About Michael Brown

Michael Brown is a specialist in control loop optimisation, with many years of experience in process control instrumentation. His main activities are consulting and teaching practical control loop analysis and optimisation. He now presents courses and performs optimisation over the internet. His work has taken him to plants all over South Africa and also to other countries. He can be contacted at: Michael Brown Control Engineering CC,
| Email: | [email protected] |
| www: | www.controlloop.co.za |
| Articles: | More information and articles about Michael Brown Control Engineering |


© Technews Publishing (Pty) Ltd | All Rights Reserved
 printer friendly version
printer friendly version