The first law of process control could be stated as saying that you cannot control if your measurement is incorrect. I use this as a slide in my courses. On one occasion a delegate protested that I was really insulting the class’s intelligence by putting up a slide with such an obvious statement. Certainly, I have no intention of insulting anyone.
My experience is that most instrument technicians, with ‘gut feelings’ developed over years of uncertainty in the practicalities of process control, will try and solve all problems by playing with the magic tuning knobs: P, I and D. Also if anything goes wrong in the plant, the first thing the process people do is to blame the control system, and ask for someone to come and retune the controller. In our courses we try and teach people that tuning is the last thing one should touch.
Many people also seem to place tremendous reliance on their measuring instruments, especially if these are ‘smart’. Another of the great fallacies in control is that “computers can overcome all problems”. Some people even seem to believe that computers can override natural laws of physics. To cite an example, I was in a petrochemical refinery where they were having trouble on a flow loop, using an orifice plate and differential pressure transmitter as the measuring system. They were trying to control the flow at 10%. When I told them that you couldn’t use an orifice plate type measurement at such a low point in the range, one of their advanced control engineers took issue and said to me that there shouldn’t be a problem as they were using a smart transmitter with a square root extractor in it. He had forgotten all the basics of the principles of such a measurement. Even a computer cannot get around these laws, and generally one should never work with a flow below 25% minimum with such a measuring system. Before I get a flood of letters back from angry suppliers, I am aware that there are now a few very special transmitters that let you get an 8:1 rangeability on orifice plate measurements. However ,the transmitter in this particular case was not one of these.
One of the other things I have become very aware of in plants is that many instrument people seem to rely entirely on the supplier for setting up a measuring system. Very often the plant people do not seem to understand very much about the instrument, how it works, its specifications, its limitations, and other important things. Many times, I have asked people to get out a particular manual, only to be told that there isn’t one, or else they can’t find it. On one occasion we did get the manual, and on opening it I discovered there were 18 user adjustments, most of which I couldn’t understand. However, there wasn’t a single person in the plant (which had a lot of instrument people) who had even read the manual, or who knew anything about the calibration of the instrument. I believe it essential that if you are reliant on a measurement for good control, you should satisfy yourself that you are fully familiar with, and understand all the various ‘ins and outs’ of the device, to ensure that you yourself are satisfied the measurement is correct.
There are a few points I would like to discuss concerning the use of smart transmitters, that I find many people are unaware of.
Firstly, the scan rate (output update repetition rate) of the device should be fast enough to follow process changes to allow the controller to react correctly. It must be remembered that the controller acts on the signal received from the transmitter. So, if we have a process that can change very quickly, and if the transmitter does not scan quickly enough to send changes to the controller, then instability can result.
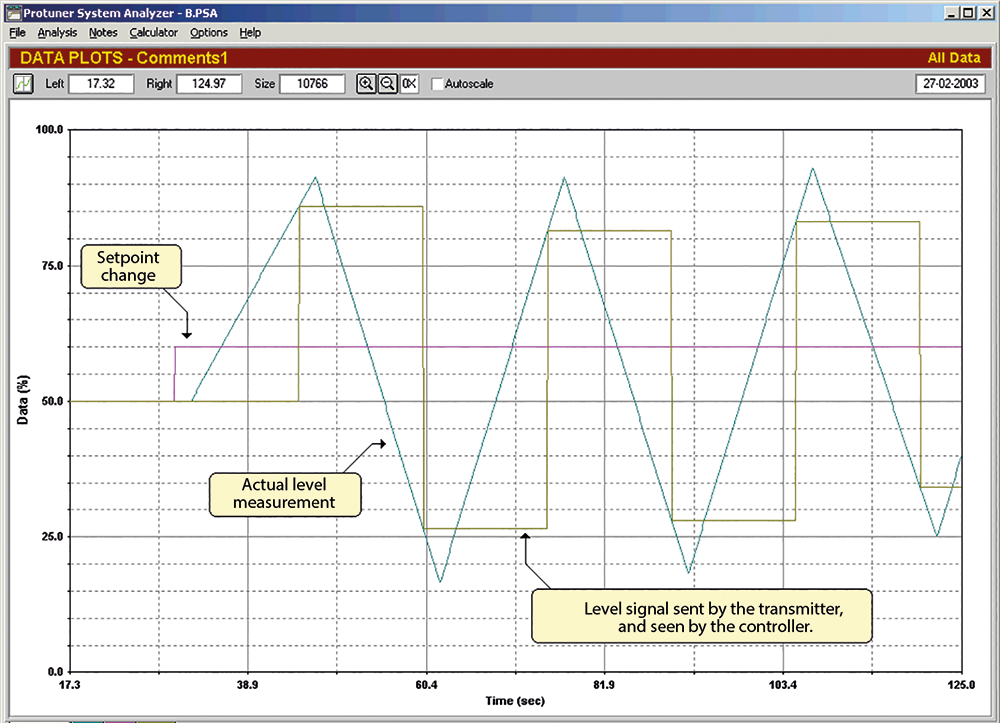
An example of this was at a mining plant where the operators could manually control the level in a fast flotation tank. As soon as they put it into automatic, it went unstable. On investigating the loop, it was found that the ultrasonic level transmitter had a scan rate of some 15 seconds. During this period the level could move quite a few percent. As a result the controller, which was scanning every half a second, was receiving out of date information. This resulted in an unstable cycle, as illustrated in Figure 1. In the figure one can see the true level being sampled by the transmitter every 15 seconds. This resulted in the controller taking violent action on every new scan to correct the error, causing the valve to reverse.
The next point is that with today’s computerised systems we may have several computerised devices passing information along the line. For example, you may be feeding a signal from a smart transmitter to a PLC. The smart transmitter has a scan rate. The PLC may have a set of analogue input cards with their own scan rate. Then the controller in the PLC will also have its own individual scan rate.
It is a generally accepted law that digital devices should sample at a rate at least twice as fast as the next downstream digital device, or instability can occur (provided their scans are not simultaneously synchronised). A general rule of thumb is that the upstream device should be at least five times faster than the downstream one. Once again, the reason behind this is to prevent the controller receiving out of date information. In reality, neither of the above two points will affect one if the process is slow. However, there is no doubt that instability can occur in fast processes.
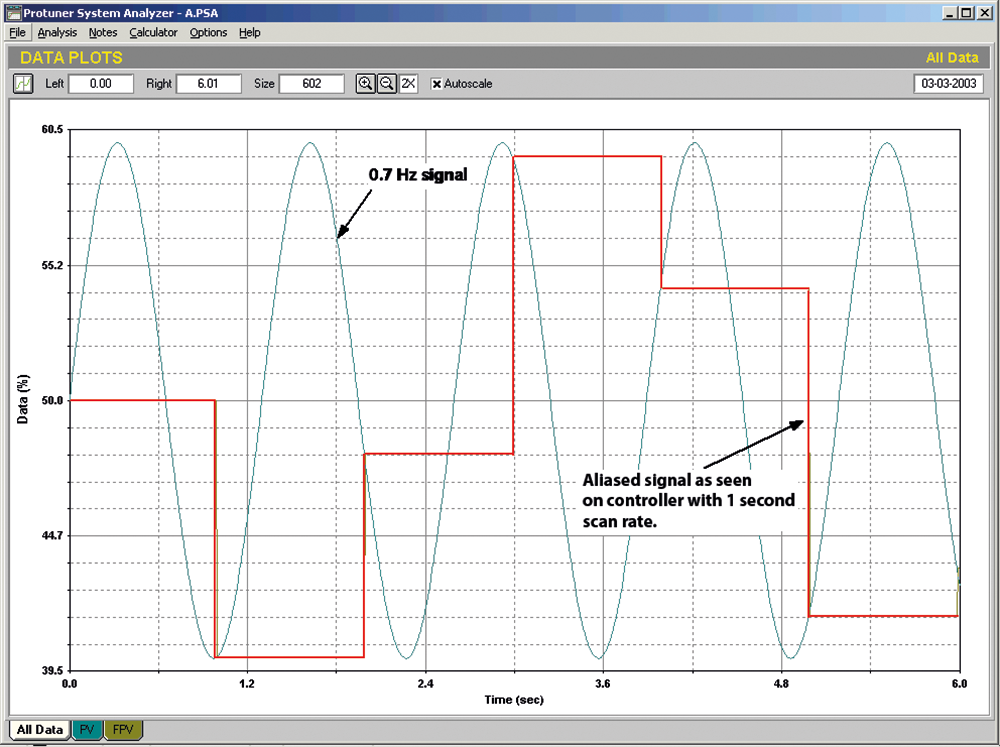
The third point concerns aliasing of noisy signals. Aliasing can occur when a controller with a relatively low scan rate receives noisy process signals. Figure 2 illustrates a signal with a frequency component of 0,7 Hz being received by a controller with a scan rate of one second. The controller switches on every second, and uses the value of the PV at that instant. It then goes back to sleep for another second before repeating the process. The figure shows how the effective signal that the controller is now working on has been changed, or aliased. The alias contains frequency components now in the region of one third and less than the original signal.
Now, unfortunately, feedback control loops generally cannot cope well with low-frequency noise. Higher frequency noise passes through the controller, and does not cause the valve to react to it. However, the valve can start responding to lower frequency signals. If it does, it can firstly shorten the valve life, and secondly increase control variance.
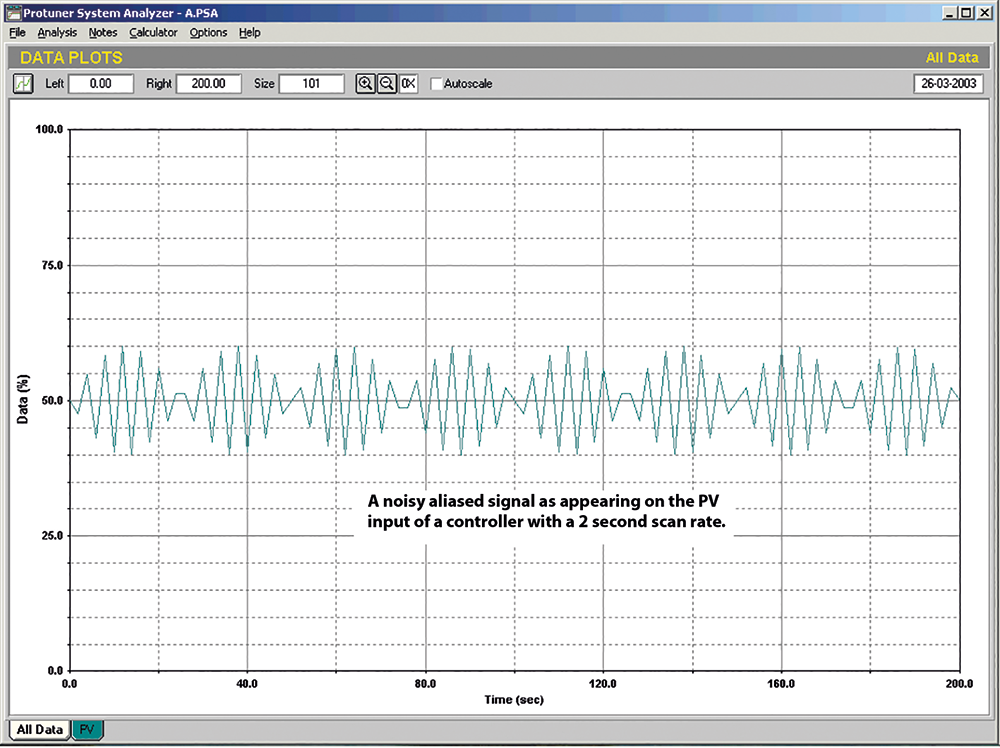
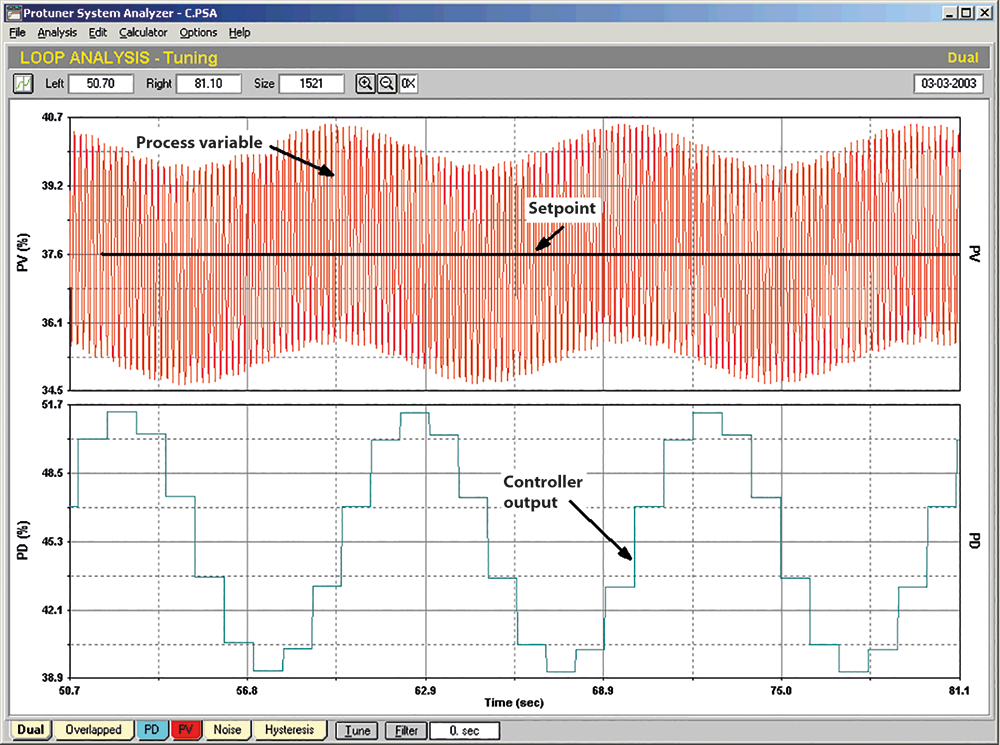
Aliased signals may contain many lower frequency harmonics and cause strange things to happen. Figure 3 illustrates how a signal with a strong sinusoidal component of 0,7 Hz will be aliased by a controller with a scan rate of two seconds. Note that there are some really low-frequency components in the alias. A control loop in automatic can easily start responding to these elements, and can actually cause a loop to oscillate, as if it was unstable. This is illustrated in Figure 4, which shows a recording of a loop running in automatic, which is cycling. The instability is caused by the loop following a low-frequency sinusoidal component caused by a signal alias. The tuning is in fact very stable.
This article has stressed how important it is to ensure that measurements are correct. People so often ignore this. During the course of writing this article, a classic example of the apparent refusal to believe measurements can be wrong occurred at a paper plant where I was optimising the controls on a paper machine. One of the most critical loops on the machine, the basis weight control, was behaving badly and fluctuating badly on an intermittent basis, literally once or twice a shift for about an hour. Analysis revealed that the problem was occurring because the flow measurement was fluctuating badly.
It is very easy to prove that it was not the control causing it, by merely placing the controller in manual. The fluctuations could, in fact, have been due to actual flow fluctuations, or due to a problem in the magnetic flow meter. At the time of writing this, the cause had not been resolved, but it would appear likely to be the flow meter, as other process variables which would have been affected by actual flow fluctuations remained steady. The fluctuations were so bad that in automatic control they caused the valve to swing around far too much, badly affecting control variance.
I explained to the operators that until the I&C; department could sort out the problem, when these fluctuations occurred, they should run the loop on manual until they disappeared again. They refused to believe this. As far as they were concerned, we had been working on the system doing tuning, and it must have been something we had done, even though they had experienced the same problem before we started on the plant. Although I spent time with them explaining the findings, they complained to various supervisors, and they changed tuning parameters themselves overnight. Here’s another mystery: How did they get through the security codes to change tuning parameters?
Eventually the production manager came storming down “to sort us out”. Fortunately, once I calmed him down and explained things to him, he did fully understand, and got everyone else to cooperate until the problem could be solved. The first step was that a new magnetic flowmeter was going to be installed on the next plant shutdown.
To me, this once again illustrates a point I am always stressing, both in these articles and in my courses: it is essential for both process and I&C; people to work as a team when performing optimisation. One of my first requests when optimising a plant is for someone with a really excellent knowledge of the process to be assigned to work with me. Unfortunately, these people are rare, with heavy workloads and many demands being made on them. As a result it is very seldom that I actually have my request granted. If it were, the optimisation would probably be more successful, take less time, cause less disruption to production, break down parochial barriers, and get the process people to accept happily, and actually welcome, properly optimised control systems.
About Michael Brown

Michael Brown is a specialist in control loop optimisation, with many years of experience in process control instrumentation. His main activities are consulting and teaching practical control loop analysis and optimisation. He now presents courses and performs optimisation over the internet. His work has taken him to plants all over South Africa and also to other countries. He can be contacted at: Michael Brown Control Engineering CC,
| Email: | [email protected] |
| www: | www.controlloop.co.za |
| Articles: | More information and articles about Michael Brown Control Engineering |


© Technews Publishing (Pty) Ltd | All Rights Reserved
 printer friendly version
printer friendly version