This Loop Signature series of articles would not be complete without sections on the problems of noise and filtering, which are two of the most misunderstood areas in process control.
For the purpose of this discussion, noise can be defined as a random variation in the process variable (PV) signal around a mean level. There can be various causes for this, but generally it is caused by the process itself, or by the measuring method. Typically, noise in flows may be caused by turbulence, and in tank levels by ripples and disturbances on the surface of the liquid in the tank.
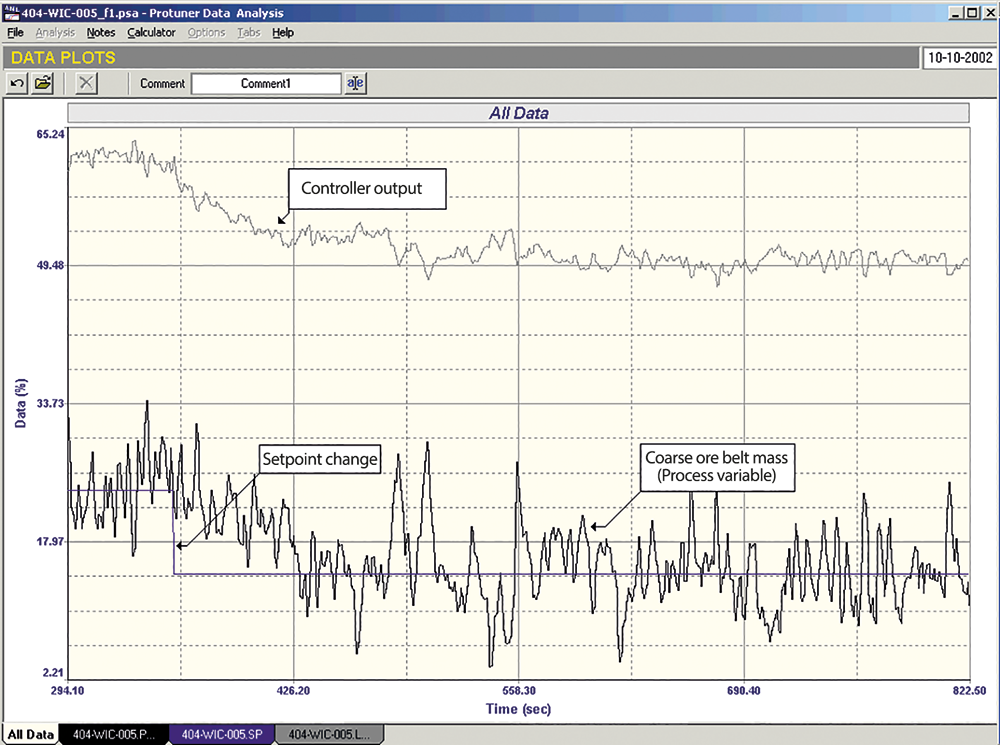
Figure 1 shows a portion of a closed loop test on a coarse ore feed conveyor belt. It can be seen that the signal coming in from the weightometer is extremely noisy. The amplitude of the noise is approximately 25%, and the noise, when put through a spectrum analyser displays more the characteristics of white noise, and does not show any significant individual harmonic frequencies. The noise in this case is mostly caused by the different sizes of rocks passing over the weightometer.
What are the detrimental effects of noise? There are really only two. Firstly, as far as the control itself is concerned, noise can be transmitted through the controller from input to output and may cause the output to start jumping about. If the final control element (e.g. valve) can follow these movements, it will lead to increased wear on the mechanical components in the final control element, leading to a shorter life, and also the control variance itself may be increased. In the example shown in Figure 1 it can be seen that the noise on the output of the controller is so small that it will not cause the ore feed system to respond to it.
Secondly, the noise can create problems for the human beings who are using the control system, like operators, process people and control and instrument personnel.
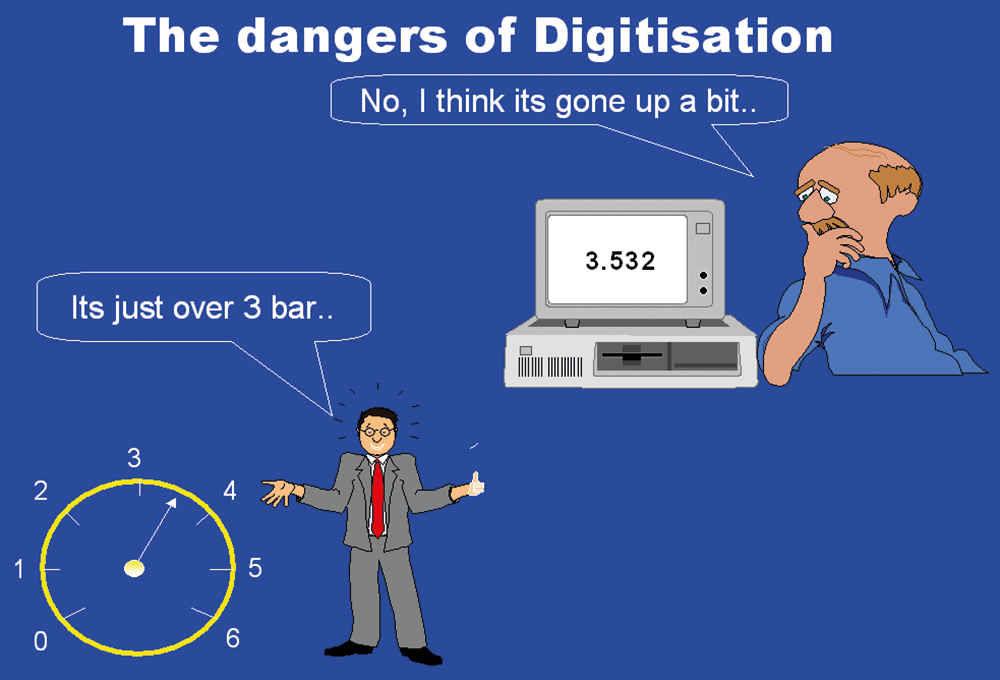
Generally the more serious of the two problems is the latter – the effect of noise on humans! To understand what I am getting at, refer to Figure 2, which shows two people in the plant looking at a pressure reading. The operator is looking at a digital signal on his screen, and sees the pressure as 3,532 bar. The other man is out in the plant looking at the pressure on the dial of a pressure gauge. He sees the position of the needle on the scale relative to the range, and also that the pressure is about 3.5 bars. The operator reading the digital signal, is completely reliant on the actual value displayed. He has no reference to a relative value, and has no immediate idea if the value is high or low, whereas the person looking at the gauge can immediately see roughly what and where the value is.
For control purposes, on most loops one is not too worried about absolute accurate values. It is generally more important that the process be kept at the setpoint value. In the old days of analogue instruments, operators often used to make a mark with a pen on the PV scale on the controller at the value where they wanted the PV to be controlled. You normally are not interested in controlling to three decimal places, and even with the best control in the world, your PV on most industrial processes is always jumping around a certain amount due to noise and minor load variations going on in the process.
With noisy signals, one has a much better idea of where your measurement is, by reading the information on an analogue indicator, or even better on a trend display or recording. If you try to view it on a digital indicator all you see are numbers jumping around and you have little idea of what is actually happening. In pre-digital days, it was difficult and also expensive to filter signals, particularly with longer time constants, and people accepted noisy displays quite happily.
However in modern times, digital technology allows one to write filters into the software very easily. It takes only a few lines of code. Furthermore, the time constant of the filters can be set to any number you please, even hours. One of the first things people now often do when programming digital control systems, is to suppress the noise by putting large filters onto the PV signal.
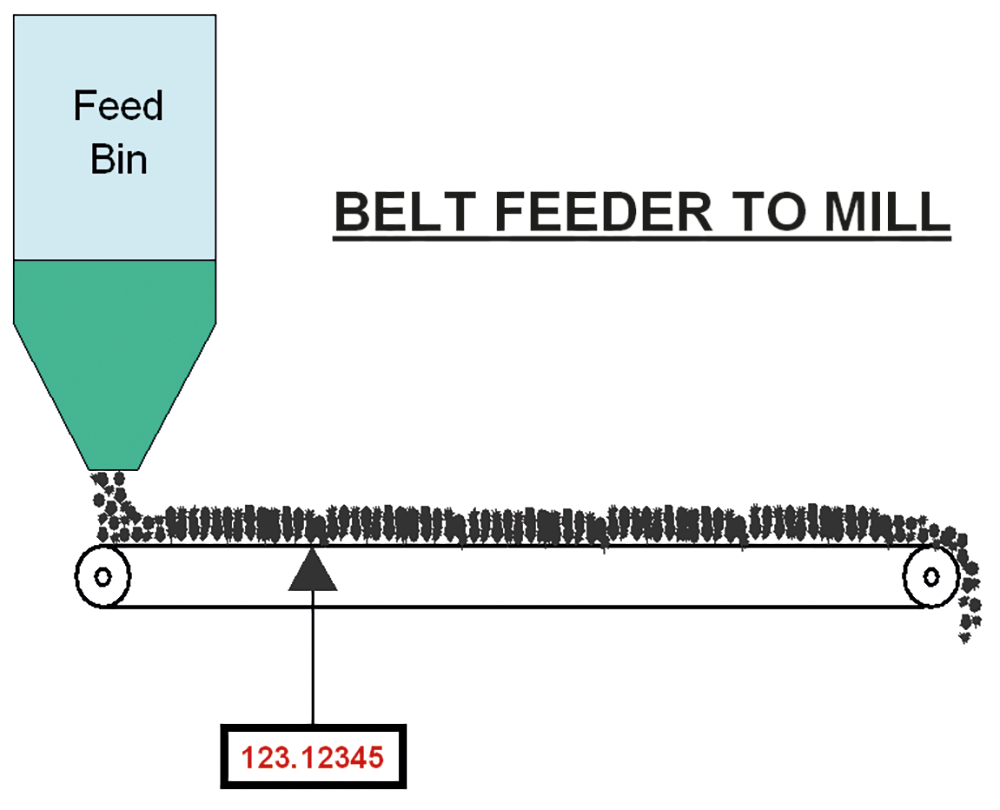
To illustrate these points with a real example, refer to Figure 3. This is a portion of a scada display showing the feed control to a milling system on a mine. There is a weightometer on the belt calibrated 0 to 200 tons. The accuracy of this instrument would be at best ±1% FS, which equates to ±2 tons. However, the person who drew the scada screen shows five numerals after the decimal point, which is ridiculous. However, the operator will believe the figure absolutely.
As can be imagined on a really noisy measurement like ore mass, the reading is jumping up and down quite considerably. A typical scada display updates every two or three seconds. In a case like this, the last seven digits of the display will probably be jumping around on virtually every update. To overcome this, the I and C personnel at the mine had put huge filters on the PV, to allow a steady reading.
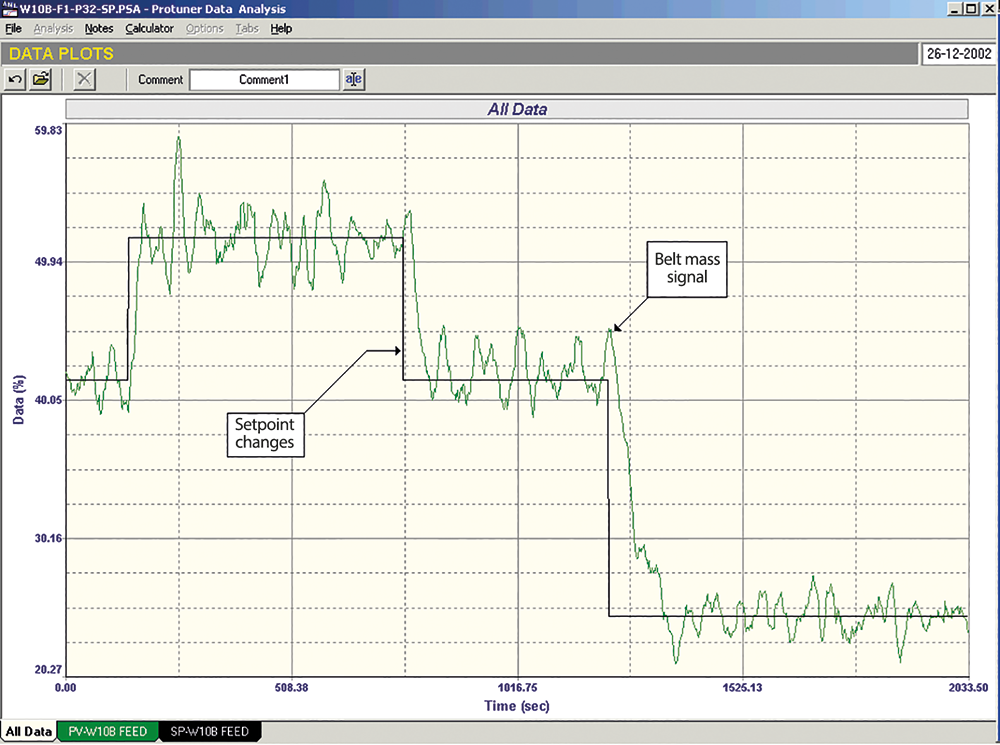
As is very often the case on feed conveyors, the loop was extremely badly tuned. Figure 4 shows the closed loop ‘as-found’ test with the existing tuning parameters. When a 10% setpoint change was made in the positive direction, it can be clearly seen that the response was almost unstable. When the setpoint was stepped back to the original value, it can be seen how long it took to get the process right back to setpoint. Please note that this recording was made with the Protuner analyser connected upstream of the filters, so the true mass signal is seen.
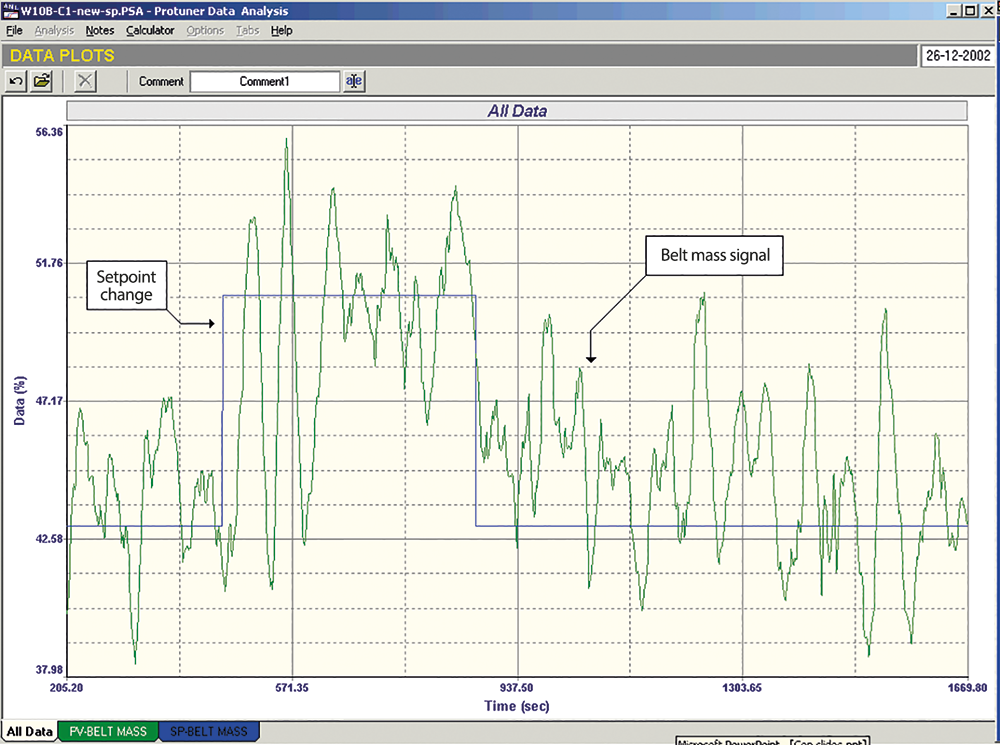
All the filters were removed and the loop retuned. Figure 5 shows the final test, with setpoint changes of 10% up, 10% down, and then 20% down being made. It can be seen just how good the control now is. The important thing here is that the quality of the control can be clearly judged using the trends, but it would be impossible to do the same using the digital display.
I worked with the operator when this work was performed, and explained to him that he must judge control on trends, and not on digital displays. He understood the reasoning, and was quite happy, particularly as it was the very first time they were able to run the milling system in automatic. Unfortunately he didn’t pass this information onto the night operator, who, when he switched to the milling screen, immediately saw the mass jumping all over the place. What does this mean to an uninformed person who is used to filtered signals? He thinks the control has gone unstable. What does he do then? He puts it into manual, as he knows this is the best way to stop a loop cycling. In this case, to his horror the signal still kept jumping around. He then tripped the plant and called out all the relevant people.
This is in fact one of my biggest problems. I spend a lot of time in plants removing filters and improving the controls. However, although I explain the reasoning to the people I work with at the time, they generally do not pass this information on, and there are always complaints later on that the control was much better before, and it is now worse and quite unstable, as the process people do not understand the difference between instability and noise.
About Michael Brown

Michael Brown is a specialist in control loop optimisation, with many years of experience in process control instrumentation. His main activities are consulting and teaching practical control loop analysis and optimisation. He now presents courses and performs optimisation over the internet.
His work has taken him to plants all over South Africa and also to other countries. He can be contacted at: Michael Brown Control Engineering CC,
| Email: | [email protected] |
| www: | www.controlloop.co.za |
| Articles: | More information and articles about Michael Brown Control Engineering |


© Technews Publishing (Pty) Ltd | All Rights Reserved
 printer friendly version
printer friendly version