

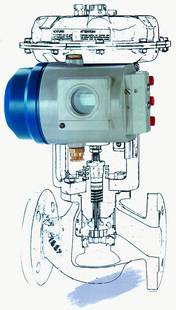
The Arcapro positioner is a valve positioner of the second-generation which is characterised by substantially increased functions, higher reliability and a more compact layout. It has been designed as a compact instrument with a modern and practical design, providing for a reliable operation even under very rough ambient conditions. The display is also visible during operation so that the operating data can be checked with a quick glance at the instrument.
The positioner allows the following modes of operation:
* Automatic operation.
* Manual operation.
* Initialisation.
* Parameterisation.
When the instrument cover is taken off the parameterisation of the positioner can be carried out by means of push-keys. The following values are adjustable:
* Direction of setpoint.
* Characteristic curve.
* Split-range operation.
* Limitation of output signal.
* Tight shut-off function.
* Function of the error report signal.
* RAM function.
Alternatively, the parameterisation can also be carried out via the HART interface or the Profibus-connection. By using the corresponding operating software all relevant values of the control valve may be indicated, eg number of valves, type of actuator, mode of operation, process and diagnostic data:
* Zero point and range.
* Setting speed.
* Setting increments.
* Dead band.
* Number of error reports.
* Number of directional changes.
* Stroke integral value.
On the user shell the current diagnostic data can be compared on-line with former maintenance data. Deviations can be seen and actuator problems may be discovered at an early stage so that repairs can be planned ahead. The preventive maintenance may thus be planned more efficiently and production stops will be reduced to a minimum.
The energy supply to the Arcapro positioner is achieved with the analog twin-core system by the input current IW. In case of three and four-core systems the auxiliary voltage EH is used. With a bus-connection, the instrument is supplied with a constant current by the bus.
The position of the actuator is transmitted to the potentiometer by a shaft and a gear with sliding clutch. The gear allows the adaption to small or large positioning angles so that strokes of 3 mm can be measured with the same accuracy as setting angles of 100°. The slide-clutch is used for the adjustment of the potentiometer when commissioning the instrument.
The major part of the positioner is the electronic board with the microprocessor and the indicating and operating elements. Here the analog, or - in the case of a bus connection – the digital setpoint signal XS is compared with the current value signal of the potentiometer. Based on a special control algorithm the controller derives signals that actuate the two piezo elements, generating the pneumatic positioning signal. Restrictor-valves allow the adaption to the volume of the actuator.
The LCD display indicates the operating conditions and the adjusted parameters or - in the case of automatic operation - the current stroke or angular value with four digits. The display is constantly visible through the screen window in the automatic operating mode.
The modular design allows optional components to be installed by lifting the cover and plugging them in.
The optional analog or binary modules are used for the transmission of the 4 to 20 mA actuator position signal or the output of two-position switches to the control system. Alternatively, the position signal can also be sent via HART or Profibus. The fault-signal output informs of power failure or deviation from a setpoint value.
| Tel: | +27 31 579 2593 |
| Email: | [email protected] |
| www: | www.valve.co.za |
| Articles: | More information and articles about Valve & Automation |


© Technews Publishing (Pty) Ltd | All Rights Reserved
 printer friendly version
printer friendly version