

Whether you realise it or not, the communication network is the single most important technological component of a machine or plant control system. The network ultimately determines the entire control architecture: a relatively slow network requires closing the faster control loops in decentralised devices, while a high performance network enables engineers to decide whether to use centralised versus decentralised architectures. In addition, a well-accepted network provides the freedom to select components from a large variety of vendors while a network dominated by a single automation giant reduces the choice to this giant’s products by default, since third-party products are either not available or not supported properly by the giant’s network configuration tool.

So how do system integrators or machine builders select their fieldbus system?
We reckon that the majority of users do not actively select their fieldbus at all – they select the control system vendor and whatever bus system this vendor provides will ‘do the job.’ The vendor is selected for a variety of reasons.
A very common reason is: history (“we have always used these products, or “our application code is written in the programming language of this vendor and we cannot justify the effort to port over the code”). Another one is: customer preference (“our clients want us to use this platform so that their maintenance team can handle the machine”). Also the local sales and application engineering team of the vendor plays a most important role (“I am happy with the vendor’s support: they are attentive and responsive and they know what they are talking about”). Vendor reputation contributes big time (“my supplier is leading edge and provides innovative technology that keeps me ahead of my competition,” or “they are so big, they must be good”). And, of course, all the other usual factors are taken into account as well: initial price (often more important than “total cost of ownership”), quality, ease of use, performance, and yes, even design.
Don’t get me wrong, these considerations are quite valid. And, in fact, they lead to EtherCAT as the bus system of choice if the name of the control system vendor of choice happens to be Beckhoff, Omron, ABB, Samsung, LSIS, Hitachi, Sanyo Denki, Kollmorgen, National Instruments or any other of the companies that have chosen EtherCAT as their system bus.
High performance legitimises broad-based support
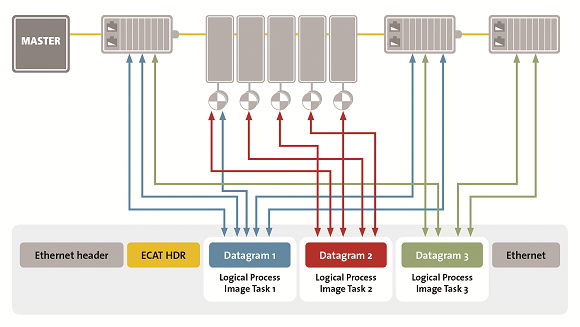
But how about those users that start their control system evaluation by taking a closer look at the bus technology itself as the key component of their system? Naturally, these are the types of users that the fieldbus organisations primarily address. We find that for many of those users that compare technologies in some detail, EtherCAT quickly becomes the favourite: its unique functional principle is compelling and makes it ‘the engineer’s choice.’ With EtherCAT, the Ethernet packet is no longer received then interpreted with process data copied at every device, but the EtherCAT slave devices read the data addressed to them while the frame passes through the node. Similarly, input data is inserted while the telegram passes through. With this technique, called ‘processing on-the-fly,’ the frames are hardly delayed at all. As a result, an EtherCAT frame comprises the data of many devices both in ‘send’ and ‘receive’ direction within one Ethernet frame and the usable data rate increases to over 90%. Figure 1 shows the idea.
The resulting higher performance then leads to more efficient machines. EtherCAT makes the processing power of an industrial PC more available for the application, and faster controls provide more accurate results. For example, Husky, a leading injection moulding machine manufacturer, reported that by using EtherCAT it was possible to reduce the part weight variation and thus the wall thickness of plastic cups their machines make. As a result, this saves material worth over $180 000 per machine, per year for Husky’s customers. But not only closed loop controls benefit from faster communications: in many applications there are so called ‘transitions,’ where one has to wait for the part to arrive, the cylinder to reach its end position, or the pressure to reach a certain threshold. With a faster network, the waiting times are reduced and the throughput of the machine or plant is increased – increasing efficiency a few percentage points can easily be achieved this way.
Also, such users understand that EtherCAT is not only fast, but also very precise: thanks to the distributed clock mechanism, measurement values can be sampled and outputs set in a synchronised manner network wide – and with a jitter substantially smaller than one microsecond. This accuracy is ideal for synchronised motion control applications and for the integration of measurement tasks within the same network.
EtherCAT is versatile: master-to-slave, slave-to-slave and master-to master communication methodologies are supported. It is also convincing that EtherCAT is inexpensive: On one hand there are the software-implemented masters on standard Ethernet ports, on the other there are the highly integrated yet low cost slave controller chips. The cabling efficiencies also save money, since EtherCAT does not require switches or other active infrastructure components and uses standard Ethernet cabling and connectors. Even engineering efforts are reduced, since network tuning is not required anymore and because the diagnostic features of EtherCAT technology provide exact error localisation, reducing troubleshooting time. (See Figure 2.)
Besides low cost chips and hardware it is important to stress again another crucial factor for low component prices: worldwide acceptance of the technology. This ideally means a wide selection of products and thus competition among the suppliers. EtherCAT is supported by the EtherCAT Technology Group (ETG) with over 3300 member companies from 58 countries, resulting in the world’s largest Industrial Ethernet organisation. The ETG meanwhile counts almost 200 vendors of EtherCAT masters, over 150 vendors of EtherCAT drives and over 100 vendors of EtherCAT I/O products in its ranks.
System integrators and machine builders also increasingly want to integrate functional safety in their control architecture – and not just to reduce wiring. Conventionally, safety functions were realised separately from the automation network, either via hardware or using dedicated safety bus systems. Safety over EtherCAT, on the other hand, enables safety-related communication and control communication on the same network and ETG members are capitalising on this in the form of exciting new safety solutions.
Flexibility and openness boost functionality
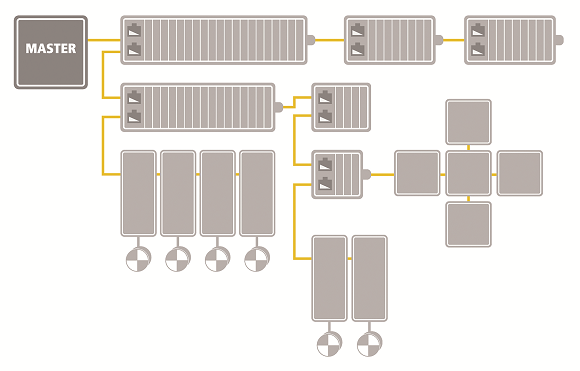
Users of EtherCAT also capitalise on the flexible topology that simplifies planning and installation. EtherCAT networks have no practical limitations regarding the topology: line, star, tree, redundant ring and all those combined with a practically unlimited number of nodes per segment. Even wireless technologies can be integrated and the ‘hot connect’ feature allows users to connect and disconnect nodes or entire network segments during runtime.
For many users, the migration from a legacy bus system can seem challenging. EtherCAT addresses this with a large selection of fieldbus gateways: more than 20 different bus systems are already supported. With these components one can integrate existing devices with a legacy fieldbus connection into an EtherCAT network and establish interfaces to ‘neighbouring’ or higher level systems. Migration from previous systems is smooth and at the same time the previously complex interface requirements of the central controllers are omitted: other systems are simply integrated via EtherCAT and no longer via PCI, cPCI, PCIe and so on.
With EtherCAT networks, there is also no need for manual address settings via dip-switch, rotary switch or similar means at every device: at boot-up, the addresses are assigned automatically. Even if devices are added later, the original addresses can be kept. EtherCAT masters can also feature automatic topology recognition with which they can compare the actual network configuration with the one expected by the application program. After device replacement, all parameters can be downloaded automatically.
When selecting a fieldbus network, true openness means future-proof implementation. That said, almost every fieldbus and Ethernet technology claims to be ‘open’. With EtherCAT, openness does not only mean international standardisation (IEC, ISO), availability of commercial (as well as shared and open source) master and slave software and chips from several suppliers. It also means implementation support that is free of charge, clear guidelines regarding interoperability, master and slave implementations for a wide variety of operating systems and controllers, openness of the configuration tools (including third-party devices) and specifications for the application interfaces. EtherCAT technology is not only fully Ethernet compatible; it is also characterised by particular openness ‘by design’: the protocol can transport other Ethernet-based services and protocols on the same physical network. Such Internet technologies are tunnelled via the EtherCAT protocol, so that the real-time characteristics are not impaired. Therefore, all Internet technologies can also be used in the EtherCAT environment: integrated web servers, e-mail, FTP transfer, etc.
An answer for all users
So we find that both groups of users – those that base their network decisions on their choice of control vendors and those that take a closer look at the bus technology itself – are increasingly moving toward EtherCAT. In summary, EtherCAT is characterised by outstanding performance, very simple wiring and openness for a wide range of devices and other protocols. EtherCAT sets new performance standards and provides, thanks to Ethernet and Internet technologies, optimum vertical integration. With EtherCAT topology complications are a matter of the past – and expensive infrastructure components are a dying breed.
For more information contact EtherCAT Technology Group, +49 911 540 56 226, [email protected], www.ethercat.org


© Technews Publishing (Pty) Ltd | All Rights Reserved
 printer friendly version
printer friendly version